|
|

|

|
| e-Pub |
Section: New Results
Physically-Based Simulation and Multisensory Feedback
Physically-based Simulation
Real-time tracking of deformable targets in 3D ultrasound sequences
Participants: Maud Marchal
Soft-tissue motion tracking is an active research area that consists in providing accurate evaluation about the location of anatomical structures. To do so, ultrasound imaging is often used since it is non-invasive, real-time and portable. Thus, several ultrasound tracking approaches have been developed in order to estimate soft tissue displacements that are caused by physiological motions and manipulations by medical tools. These methods have gained significant interest for image-guided therapies such as radio-frequency ablation or high-intensity focused ultrasound. In our work, we present a real-time approach that allows tracking deformable structures in 3D ultrasound sequences [8]. Our method consists in obtaining the target displacements by combining robust dense motion estimation and mechanical model simulation. We performed an evaluation of our method through simulated data, phantom data, and real-data. Results demonstrate that this novel approach has the advantage of providing correct motion estimation regarding different ultrasound shortcomings including speckle noise, large shadows and ultrasound gain variation. Furthermore, we show the good performance of our method with respect to state-of-the-art techniques by testing on the 3D databases provided by MICCAI CLUST'14 and CLUST'15 challenges.
This work was done in collaboration with LAGADIC team and b<>com.
3D Haptic Interaction
DesktopGlove: a Multi-finger Force Feedback Interface Separating Degrees of Freedom Between Hands
Participants: Merwan Achibet and Maud Marchal
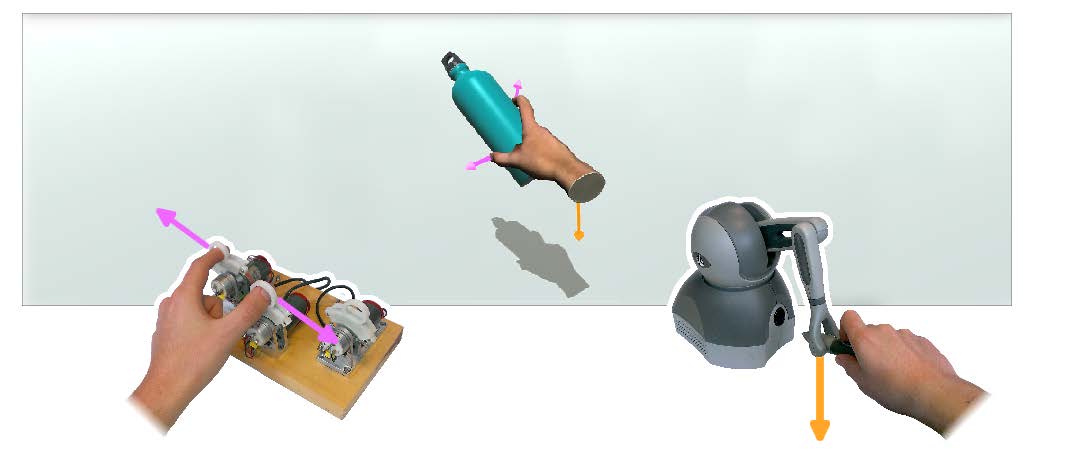
In virtual environments, interacting directly with our hands and fingers greatly contributes to immersion, especially when force feedback is provided for simulating the touch of virtual objects. Yet, common haptic interfaces are unfit for multi-finger manipulation and only costly and cumbersome grounded exoskeletons do provide all the efforts expected from object manipulation. To make multi-finger haptic interaction more accessible, we have proposed to combine two affordable haptic interfaces into a bimanual setup named DesktopGlove. With this approach, each hand is in charge of different components of object manipulation: one commands the global motion of a virtual hand while the other controls its fingers for grasping (see Figure 9). In addition, each hand is subjected to forces that relate to its own degrees of freedom so that users perceive a variety of haptic effects through both of them. Our results show that (1) users are able to integrate the separated degrees of freedom of DesktopGlove to efficiently control a virtual hand in a posing task, (2) DesktopGlove shows overall better performance than a traditional data glove and is preferred by users, and (3) users considered the separated haptic feedback realistic and accurate for manipulating objects in virtual environments [12].
This work was done in collaboration with MJOLNIR team.
|
ElasticArm: leveraging passive haptic feedback in virtual environments
Participants: Merwan Achibet, Adrien Girard, Anatole Lécuyer and Maud Marchal
Haptic feedback is known to improve 3D interaction in virtual environments but current haptic interfaces remain complex and tailored to desktop interaction. In [2], we describe an alternative approach called “Elastic-Arm” for incorporating haptic feedback in immersive virtual environments in a simple and cost-effective way. The Elastic-Arm is based on a body-mounted elastic armature that links the user's hand to his body and generates a progressive egocentric force when extending the arm. A variety of designs can be proposed with multiple links attached to various locations on the body in order to simulate different haptic properties and sensations such as different levels of stiffness, weight lifting, bimanual interaction, etc. Our passive haptic approach can be combined with various 3D interaction techniques and we illustrate the possibilities offered by the Elastic-Arm through several use cases based on well-known techniques such as the Bubble technique, redirected touching, and pseudo-haptics. A user study was conducted which showed the effectiveness of our pseudo-haptic technique as well as the general appreciation of the Elastic-Arm. We believe that the Elastic-Arm could be used in various VR applications which call for mobile haptic feedback or human-scale haptic sensations.
Vision-based adaptive assistance and haptic guidance for safe wheelchair corridor following
Participants: Maud Marchal
In case of motor impairments, steering a wheelchair can become a hazardous task. Joystick jerks induced by uncontrolled motions may lead to wall collisions when a user steers a wheelchair along a corridor. In [7] we introduce a low-cost assistive and guidance system for indoor corridor navigation in a wheelchair, which uses purely visual information, and which is capable of providing automatic trajectory correction and haptic guidance in order to avoid wall collisions. A visual servoing approach to autonomous corridor following serves as the backbone to this system. The algorithm employs natural image features which can be robustly extracted in real time. This algorithm is then fused with manual joystick input from the user so that progressive assistance and trajectory correction can be activated as soon as the user is in danger of collision. A force feedback in conjunction with the assistance is provided on the joystick in order to guide the user out of his dangerous trajectory. This ensures intuitive guidance and minimal interference from the trajectory correction system. In addition to being a low-cost approach, it can be seen that the proposed solution does not require an a-priori environment model. Experiments on a robotised wheelchair equipped with a monocular camera prove the capability of the system to adaptively guide and assist a user navigating in a corridor.
This work was done in collaboration with LAGADIC team.
Tactile Interaction at Fingertips
The fingertips are one of the most important and sensitive parts of our body. They are the first stimulated areas of the hand when we interact with our environment. Providing haptic feedback to the fingertips in virtual reality could, thus, drastically improve perception and interaction with virtual environments. Within this context, we proposed two contributions for tactile feedback and haptic interaction at the fingertips.
The Haptip
Participants: Adrien Girard, Yoren Gaffary, Anatole Lécuyer and Maud Marchal
In [5], we present a modular approach called HapTip to display such haptic sensations at the level of the fingertips. This approach relies on a wearable and compact haptic device able to simulate 2 Degree of Freedom (DoF) shear forces on the fingertip with a displacement range of 2 mm. Several modules can be added and used jointly in order to address multi-finger and/or bimanual scenarios in virtual environments. For that purpose, we introduce several haptic rendering techniques to cover different cases of 3D interaction, such as touching a rough virtual surface, or feeling the inertia or weight of a virtual object. In order to illustrate the possibilities offered by HapTip, we provide four use cases focused on touching or grasping virtual objects (see Figure 10). To validate the efficiency of our approach, we also conducted experiments to assess the tactile perception obtained with HapTip. Our results show that participants can successfully discriminate the directions of the 2 DoF stimulation of our haptic device. We found also that participants could well perceive different weights of virtual objects simulated using two HapTip devices. We believe that HapTip could be used in numerous applications in virtual reality for which 3D manipulation and tactile sensations are often crucial, such as in virtual prototyping or virtual training.
|

This work was done in collaboration with CEA List.
Studying one and two-finger perception of tactile directional cues
Participants: Yoren Gaffary, Anatole Lécuyer and Maud Marchal
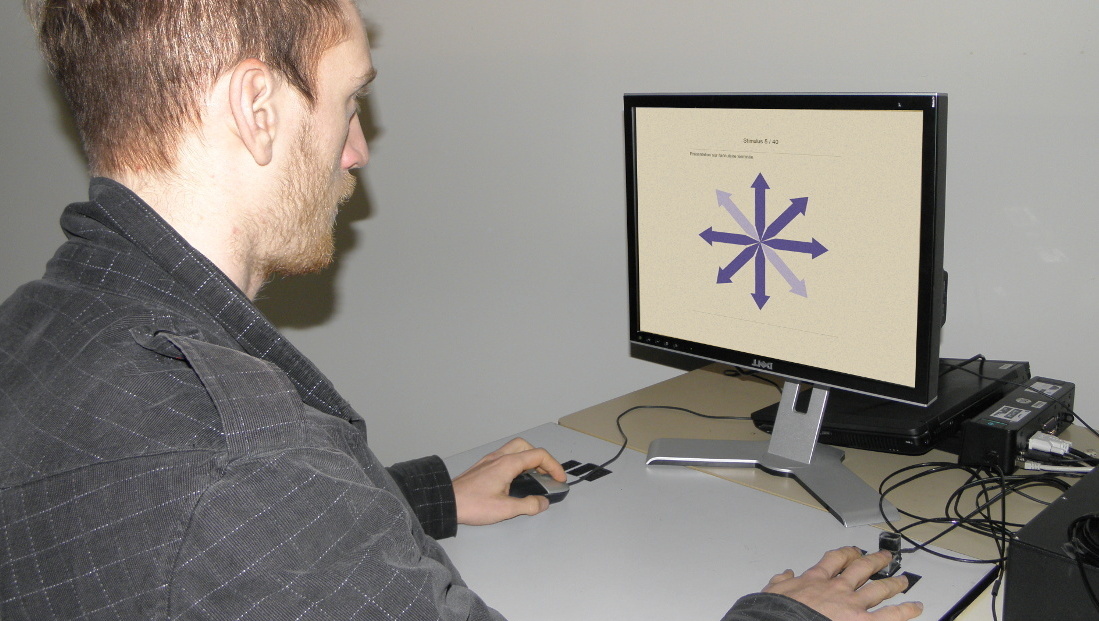
In [20], we study the perception of tactile directional cues by one or two fingers, using either the index, middle, or ring finger, or any of their combination. Therefore, we use tactile devices able to stretch the skin of the fingertips in 2 DOF along four directions: horizontal, vertical, and the two diagonals. We measure the recognition rate in each direction, as well as the subjective preference, depending on the (couple of) finger(s) stimulated (see Figure 11). Our results show first that using the index and/or middle finger performs significantly better than using the ring finger on both qualitative and quantitative measures. The results when comparing one versus two-finger configurations are more contrasted. The recognition rate of the diagonals is higher when using one finger than two, whereas two fingers enable a better perception of the horizontal direction. These results pave the way to other studies on one versus two-finger perception, and raise methodological considerations for the design of multi-finger tactile devices.
|
This work was done in collaboration with CEA List, IRMAR and Agrocampus Ouest.